無線傳感器網(wǎng)絡(luò)是指由大量隨機分布的集成了傳感器單元、數(shù)據(jù)處理單元、通信單元和電源單元的微小節(jié)點并通過自組織方式構(gòu)成的分布式網(wǎng)絡(luò),其目的是借助于微小節(jié)點內(nèi)置的各種傳感器來遠程監(jiān)測所感興趣的目標或?qū)ο螅赃M行任務(wù)感知、數(shù)據(jù)采集和處理。
無線傳感器網(wǎng)絡(luò)技術(shù)的發(fā)展使得大規(guī)模的傳感器網(wǎng)絡(luò)成為了可能。但是隨之帶來的是網(wǎng)絡(luò)的可靠性降低了,特別是網(wǎng)絡(luò)節(jié)點的位置信息不好確定,對于大多數(shù)應(yīng)用來說,不知道傳感器節(jié)點位置而感知的數(shù)據(jù)是沒有意義的,節(jié)點的自定位功能被認為是系統(tǒng)的基本功能之一。因此,無線傳感器網(wǎng)絡(luò)中節(jié)點定位技術(shù)的研究非常重要,并且已成為無線傳感器網(wǎng)絡(luò)的基礎(chǔ)支撐技術(shù)。
一般而言,無線傳感器網(wǎng)絡(luò)的定位技術(shù)分為基于距離的定位和非基于距離的定位。基于距離的無線傳感器節(jié)點定位技術(shù)一般分為兩個階段:首先是測量無線傳感器網(wǎng)絡(luò)中節(jié)點間的距離; 然后根據(jù)節(jié)點間的距離和現(xiàn)有的傳感器節(jié)點定位算法,如三邊測量法等計算出無線傳感器網(wǎng)絡(luò)中某節(jié)點的位置。因此,節(jié)點測距技術(shù)是無線傳感器網(wǎng)絡(luò)中基于距離的節(jié)點定位技術(shù)的基礎(chǔ)。
本文通過研究國內(nèi)外無線傳感器網(wǎng)絡(luò)定位技術(shù)的發(fā)展現(xiàn)狀,提出采用T OF 測距技術(shù)實現(xiàn)節(jié)點測距,從而提高基于距離的節(jié)點自定位技術(shù)的定位精度。
1 無線傳感器網(wǎng)絡(luò)中的測距方法
在無線傳感器網(wǎng)絡(luò)中,常用的測量節(jié)點間距離的方法主要有TOA( Time of Arrival) ,TDOA( Time Dif ference of Arrival ) 、超聲波、RSSI ( Received Sig nalSTrength Indicator) 和TOF( Time of Light ) 等。
TOA 和TDOA 測距技術(shù)都是通過信號的傳播時間和信號的速度兩個參數(shù)來計算距離的,無線信號傳輸速率大,時間測量上很小的誤差就可能導致距離上很大的誤差,并且TOA 需要昂貴的設(shè)備來保持時間同步,能量消耗大。TOA 測距涉及到信號傳輸時間的測量,以此來估算兩個節(jié)點間的距離。它能夠運行在高多路徑環(huán)境,并且提供分米級的測距精度。
超聲波測距方法是指當發(fā)射節(jié)點發(fā)射的超聲波遇到障礙物時就會發(fā)生反射,反射波可由接收器接收,這樣只要測出超聲波從發(fā)送點到反射回來的時間間隔△t,就能測距。因此,超生波從發(fā)射處到障礙物之間的距離為c△t/ 2( c 為超聲波在介質(zhì)中的傳播速度) 。利用超聲波測距很精確,測量誤差只有10 cm,但由于超聲波是一種聲波,而聲速c 受環(huán)境溫度、濕度等因素的影響。另外,測距時需要額外的硬件支持,增加了節(jié)點的硬件成本和尺寸。
RSSI 是最基本的測距方法,基本不需要額外的硬件設(shè)備,實現(xiàn)方法簡單。在基于接收信號強度指示RSSI的測距中,已知發(fā)射節(jié)點的發(fā)射信號強度,接收節(jié)點根據(jù)收到的信號強度計算出信號的傳播損耗,利用理論和經(jīng)驗模型將傳輸損耗轉(zhuǎn)化為節(jié)點間的距離。其理論模型為:

式中:p ( d) 表示在距離d 處的信號強度; n 表示路徑長度和路徑損耗之間的比例因子,范圍在2~ 4 之間; p ( d0 )表示在距離d0 處的信號強度; d 表示需要計算的節(jié)點與基站間的距離; d0 表示參考節(jié)點與基站間的距離 。因傳感器節(jié)點本身具有無線通信能力,故它是一種低功率、廉價的測距技術(shù),RADAR 等項目中使用了該技術(shù)。
雖然在實驗環(huán)境中RSSI 表現(xiàn)出良好的特性,但是在實際環(huán)境中,它易受溫度、無線信號的反射、障礙物( 如陸地建筑物) 、傳播模式等諸多因素的影響,因此該技術(shù)在實際應(yīng)用中仍存在困難,通常將其看作為一種粗糙的測距技術(shù),有可能產(chǎn)生± 50% 的測距誤差。
TOF 測距技術(shù)可以理解為飛行時差測距( Time ofFlight Measurement ) 方法,傳統(tǒng)的測距技術(shù)分為雙向測距技術(shù)( Two Way Rang ing ) 和單向測距技術(shù)( ONeWay Ranging) 。T OF 測距方法屬于雙向測距技術(shù),它主要利用信號在兩個異步收發(fā)機( Transceiver) 之間往返的飛行時間來測量節(jié)點間的距離。在信號電平比較好調(diào)制或在非視距視線環(huán)境下,基于RSSI 測距方法估算的結(jié)果比較理想; 在視距視線環(huán)境下,基于T OF 測距方法估算的結(jié)果比較理想,是隨距離呈線性關(guān)系的。因此,基于TOF 距離估算方法能夠彌補基于RSSI 距離估算方法的不足。另外,具體應(yīng)用時可以聯(lián)合使用兩種方法來提高定位系統(tǒng)的精確度。
TOF 測距方法是D. McCrady 提出的,然而該技術(shù)只側(cè)重于直接序列擴頻( DSSS) 的通信系統(tǒng)。接下來,M. Ciur ana 也對T OF 測距技術(shù)有所研究,他首次在IEEE 802. 11b 的無線局域網(wǎng)中使用T OF 測距技術(shù), 然而需要額外的硬件幫助。在無線傳感器網(wǎng)絡(luò)中,也有許多學者對TOF 測距技術(shù)進行了研究。然而,他們側(cè)重于無線傳感器網(wǎng)絡(luò)中某個特殊的典型現(xiàn)場,如可編程門陣列( FPGA) 的實現(xiàn),并且需要一個專門的基礎(chǔ)設(shè)施,而這個基礎(chǔ)設(shè)施也不能廣泛應(yīng)用于IEEE 8021. 11( 無線) 網(wǎng)絡(luò)中。
在本文中,考慮用窄帶射頻的T OF 測距方法及標準的IEEE 802. 11b 無線芯片來完成無線傳感網(wǎng)絡(luò)準確估計點到點之間的距離。
2 TOF 測距方法原理
在T OF 測距時,本地節(jié)點A 向遠程節(jié)點B 發(fā)送一個數(shù)據(jù)包,當B 節(jié)點收到數(shù)據(jù)包時,會自動發(fā)送一個確認來響應(yīng)這個數(shù)據(jù)包。執(zhí)行過程如圖1 所示。
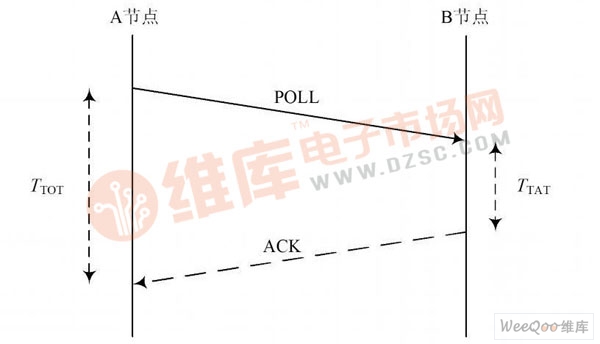
圖1 TOF 測距過程
A 節(jié)點測量出從發(fā)送數(shù)據(jù)包到接收確認的時間,這段消耗總時間記為TT OT 時間; B 記錄了B 從收到數(shù)據(jù)包到B 回應(yīng)確認消息的這個時間段的時間,記為TT AT 。用T TOT 總時間減去周轉(zhuǎn)時間TT AT 就是雙方的數(shù)據(jù)包在飛行中度過的往返時間,記為TRTT 時間。假定在每個方向發(fā)生的飛行時間TTO F 等于50% 的往返時間,如式( 2) 所示:

當計算出TT OF 后,根據(jù)D = T c( T 代表T TOF ; c 代表光速,為3×108 ms- 1 ) 可以計算出節(jié)點間的距離。
TOF 測距方法有兩個關(guān)鍵的約束:一是發(fā)送設(shè)備和接收設(shè)備必須始終同步; 二是接收設(shè)備提供信號的傳輸時間的長短。為了實現(xiàn)時鐘同步,TOF 測距方法采用了時鐘偏移量來解決時鐘同步問題。但由于T OF測距方法的時間依賴于本地和遠程節(jié)點,測距精度容易受兩端節(jié)點中時鐘偏移量的影響。為了減少此類錯誤的影響,這里采用反向測量方法,即遠程節(jié)點發(fā)送數(shù)據(jù)包,本地節(jié)點接收數(shù)據(jù)包,并自動響應(yīng),通過平均在正向和反向所得的平均值,減少對任何時鐘偏移量的影響,從而減少測距誤差。
3 TOF 測距實驗
3. 1 實驗準備
實驗時,采用了Jennic JN5148 EK010 開發(fā)平臺作為實驗平臺來完成TOF 測距試驗。JN5148 通信模塊具有超低功耗、高性能,完全兼容IEEE 802. 15. 4 等特點。它集成了32 b 的RSIC MCU 內(nèi)核、高性能的2. 4 GH z IEEE 802. 15. 4 收發(fā)器,主要應(yīng)用在ZigBeePRO 的無線傳感器網(wǎng)絡(luò)中[ 12] 。
Jennic 的JN5148 無線微控制器包括一個硬件的飛行時間( TOF) 引擎,能夠測量2. 4 GHz 的無線電信號在兩個節(jié)點之間的飛行時間。由于飛行時間與傳輸距離成正比,故可以用來估算節(jié)點間的距離。
3. 2 實驗描述
選擇兩個JN 5148 節(jié)點,分別為A 節(jié)點和B 節(jié)點。A 節(jié)點作為Coordinator 節(jié)點,B 節(jié)點作為EndDevice節(jié)點。其中,B 節(jié)點通過串口與PC 機相連,在PC 機通過串口調(diào)試軟件來查看相關(guān)信息; A 節(jié)點作為移動節(jié)點,用來改變節(jié)點間的實際距離。通過實際測量結(jié)果與TOF 測距結(jié)果的對比來驗證測距方法的有效性。
根據(jù)不同的實驗環(huán)境和測試距離,設(shè)計了4 種類型的實驗,分別為Line o f Sight ( LOS) ,No Line of Sight( NLOS) ,Indoo r,走廊等測距實驗。其中,LOS 表示視線可達的區(qū)域,在一個無障礙的麥地進行測試; NLOS 表示視線不可達的區(qū)域,在果園里進行測試,在兩個節(jié)點直線距離中間有建筑物、樹木等障礙物; Indoor測距實驗被安排在實驗室進行測試; 走廊實驗在某棟樓的走廊進行測試,障礙墻厚度為30 cm,走廊寬為3 m,長約30 m。
3. 3 實驗結(jié)果
為了減少測距的誤差,采用多次測距求平均值的方法來估算距離。在10. 5 m 的室內(nèi)測距實驗中,EndDev ice 節(jié)點放在一個房間內(nèi),而Coor dinator 節(jié)點放在走廊內(nèi),中間隔著一堵墻,測量結(jié)果如圖2 所示,測量60 次( 一個點3 次,共20 個測量點) 樣本數(shù)據(jù)的平均誤差在1. 94 m,最大誤差距離為3. 55 m。在26 m 的走廊測距實驗中,測量60 次樣本數(shù)據(jù)的平均誤差在2. 01 m,最大誤差距離為5. 1 m,樣本數(shù)據(jù)如圖3 所示。
在100 m 的LOS 測距試驗中,測量60 次樣本數(shù)據(jù)的平均誤差在3. 62 m,最大誤差距離為11. 2 m,樣本數(shù)據(jù)如圖4 所示。在100 m 的NLOS 測距試驗中,測量60 次樣本數(shù)據(jù)的平均誤差在4. 47 m,最大誤差距離為19. 6 m,樣本數(shù)據(jù)如圖5 所示。實驗結(jié)果證明,TOF 的精度較高,可以滿足WSN 定位技術(shù)的要求。
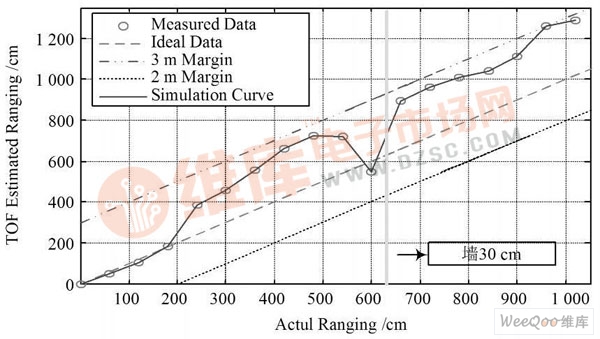
圖2 室內(nèi)測距樣本圖
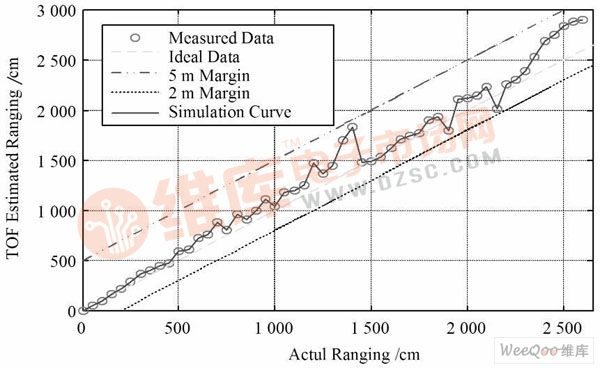
圖3 走廊測距樣本圖
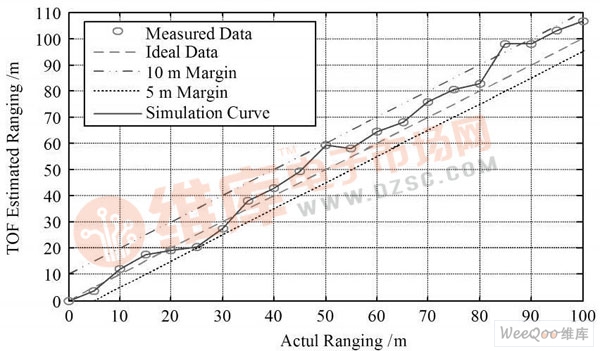
圖4 LOS 測距樣本圖
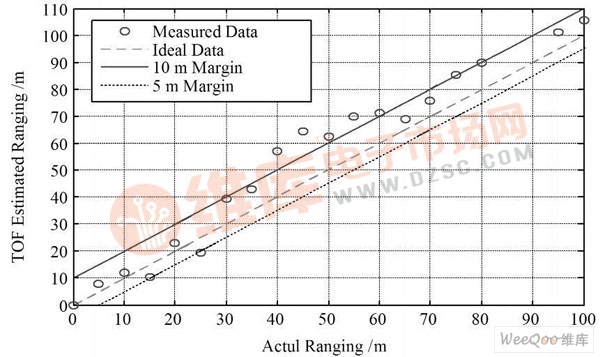
圖5 NLOS 測距樣本圖
4 結(jié) 論
介紹了基于TOF 的節(jié)點測距技術(shù)。通過實驗證明,用時鐘偏移量方法可以有效實現(xiàn)時間同步,用求正反方向的T OF 平均值的方法可以有效減少誤差。
TOF 測距實驗在室內(nèi)、室外進行了多種測試。實驗結(jié)果表明,在10. 5 m 的室內(nèi),測量樣本數(shù)據(jù)的平均誤差在1. 94 m; 在26 m 的走廊,測量樣本數(shù)據(jù)的平均誤差在2. 01 m; 在100 m 的LOS,測量樣本數(shù)據(jù)的平均誤差在3. 62 m; 在100 m 的NLOS,測量樣本數(shù)據(jù)的平均誤差在4. 47 m。上面的實驗數(shù)據(jù)顯示,不同的實驗環(huán)境,誤差大小也不同,這主要受信號傳輸路徑的影響。因為在信號的傳播過程中,由于受地面或水面反射和大氣折射的影響,接收到的信號有可能不是單一路徑來的,而是由許多路徑來的眾多反射波合成的,因此測量信號的傳輸時間就會有誤差,從而影響估算距離的精確度。
總之,結(jié)果表明,T OF 是一種精確度較高的測距方法,適用于無線傳感器網(wǎng)絡(luò),能夠得到廣泛應(yīng)用。








